A 30-year journey from a research lab to a factory wall
AI did not arrive in industry overnight. The credible use of artificial intelligence inside an active safety system is the end-point of a long arc of research, hardware progress and engineering choices, most of which had nothing to do with safety at the time they were made. Knowing the arc matters, because it tells you which parts of today’s claims are real and which are still mostly marketing.
What follows is a short, deliberately selective tour through the milestones that mattered, finishing at the SAiFI Edge Essential system on the wall of an industrial site in 2026.
1997: Deep Blue and the limits of brute-force AI
In May 1997, IBM’s Deep Blue defeated the reigning world chess champion Garry Kasparov in a six-game match in New York. It is the moment most people remember as “AI beat a human”. Technically, Deep Blue evaluated up to roughly 200 million chess positions per second on 32 purpose-built processors. It did not learn the way modern systems learn. It searched, very fast, inside a tightly constrained problem space.1
The takeaway for industry is not that AI was “solved” in 1997. It very much was not. The takeaway is that bounded, rule-governed problems were already tractable with enough compute. Industrial safety is not a chess board. The next two decades were about getting AI out of the chess board and into the real world.
2012: AlexNet and the deep-learning inflection point
The serious turning point for computer vision came at the ImageNet Large Scale Visual Recognition Challenge in 2012. A deep convolutional neural network from Alex Krizhevsky, Ilya Sutskever and Geoffrey Hinton, now widely known as AlexNet, achieved a top-5 test error rate of 15.3% on ImageNet, a roughly 10-point improvement on the second best entry that year.2
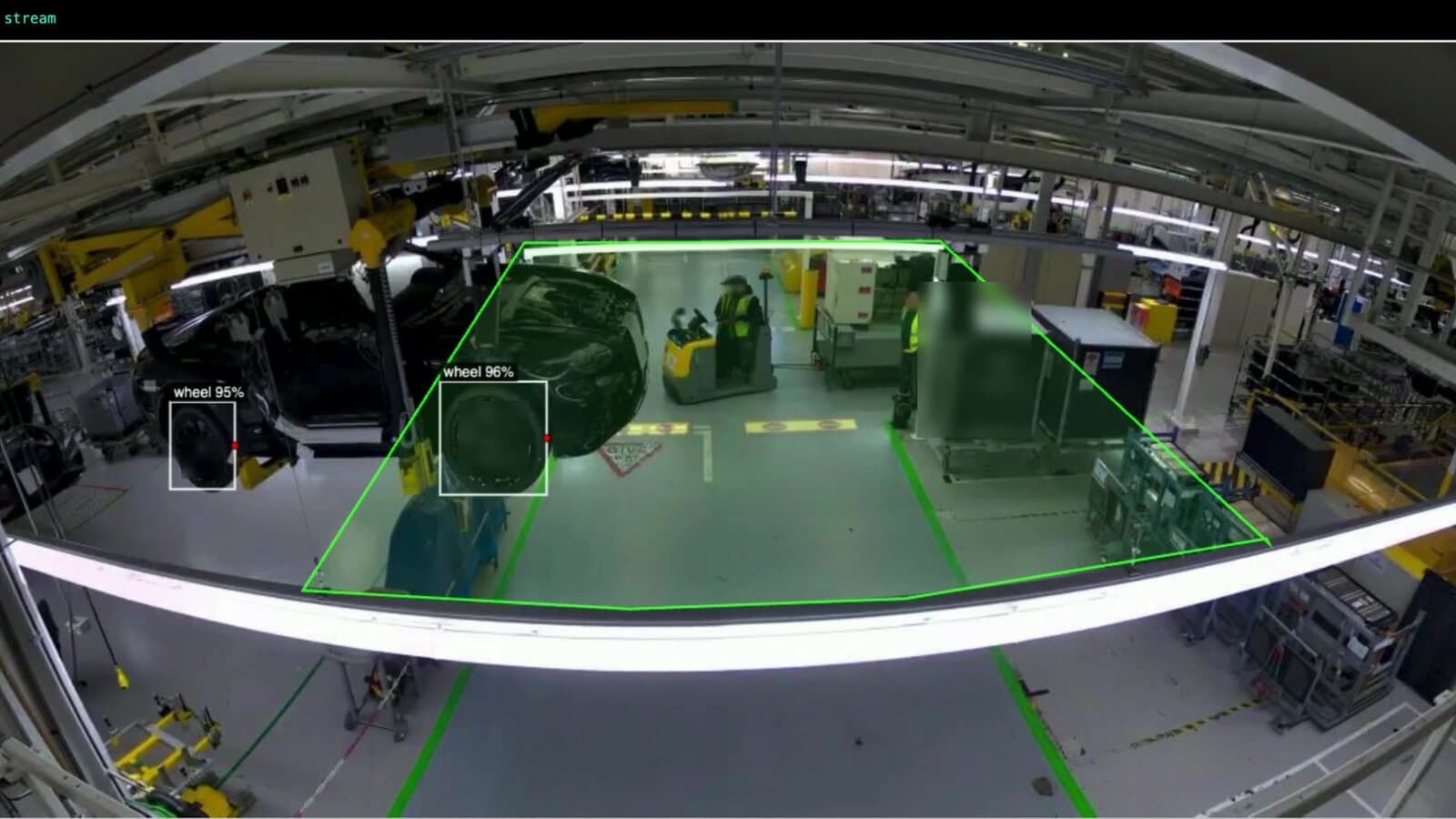
AlexNet is rightly described as an inflection point, not a single result. After 2012, serious work on image classification, detection and segmentation moved almost entirely to deep learning. Everything an industrial-safety vision system does today, from identifying a pedestrian to spotting a forklift, a hi-vis vest or a wheel, stands on that shift.
2015-16: Real-time object detection becomes practical
Classifying a single image is one problem. Finding and labelling every object in a live video feed, fast enough to act on what you see, is a much harder one. Until 2015, the best detection pipelines were too slow for real-time use.
That changed with YOLO (“You Only Look Once”), introduced by Joseph Redmon and colleagues and presented at CVPR 2016. YOLO reframed detection as a single-shot regression problem and ran the base model at 45 frames per second, with a smaller variant reaching 155 frames per second.3 Detection at video frame rates was no longer a research demo. It was a working baseline.
For safety, this is the moment the door opened. You cannot intervene in real time on something you only finish processing several seconds later.
2016: AlphaGo and the reach of deep reinforcement learning
Also in early 2016, DeepMind’s AlphaGo defeated the European Go champion 5-0 and shortly after beat Lee Sedol 4-1 in Seoul. The accompanying Nature paper, by David Silver and colleagues, combined deep neural networks for position evaluation and move selection with Monte Carlo tree search. Go has a search space that is many orders of magnitude larger than chess, and the consensus before AlphaGo was that superhuman performance was at least a decade away.4
AlphaGo did not put a camera on a factory wall, but it changed the conversation about what AI was capable of in problems that had previously been considered intractable. Investment, talent and tooling followed.
2018 onwards: the edge AI hardware era
By the late 2010s, the algorithmic work had outrun the hardware available outside data centres. To run modern vision models inside an industrial enclosure, on-site, you needed compute that did not exist in a credible form a decade earlier.
By the early 2020s, industrial-grade edge AI accelerators from the major silicon vendors had matured to the point where running modern vision models on-site, inside an industrial enclosure, became a credible engineering proposition rather than a research demo. Modules in this class typically deliver tens of trillions of operations per second in compact, power-efficient form factors — enough to run real-time detection on multiple cameras simultaneously without any dependence on a cloud back-end.5 That is the hardware step that made on-site, offline-first, deterministic vision-AI safety practical, not just demonstrable on a slide.
2026: SAiFI on the wall
SAiFI sits at the end of this arc. A SAiFI Edge Essential system is a wall-mounted enclosure on an industrial site, drawing on every layer of the journey above:
- •Modern convolutional detection models, traceable through AlexNet and the deep-learning era that followed.
- •Real-time detection pipelines that descend from the YOLO line of work, fast enough to react inside a safety-critical latency budget.
- •Reinforcement-style learning techniques that inform how detection and decision logic generalise across sites and conditions.
- •Edge compute hardware, mature and power-efficient enough to live inside an industrial enclosure on site without a server room or a cloud link.
- •A rules-and-zones layer that turns raw detections into deterministic actions on real-world infrastructure: lights, signs, gates, sirens, interlocks.
The reason that combination meets the under-150-millisecond detection-to-action target is not one breakthrough. It is all of them, layered together and packaged for the floor of an industrial site, with the engineering choices that an industrial environment actually requires: deterministic behaviour, offline operation, integration with existing safety infrastructure, and a clear audit trail.
Why the arc matters when you evaluate a vendor
Most credible claims a vision-AI safety vendor makes today are built on the milestones above. Most non-credible ones are not. When evaluating a system, the useful questions are concrete and they tie back to this arc:
- •Is the detection model from the modern deep-learning era, trained on real industrial imagery, not a generic web dataset?
- •Does the pipeline run in real time, with detection-to-action latency measured rather than estimated?
- •Does the system run locally on edge compute, or does it depend on a network round-trip to a cloud service?
- •Does it drive deterministic actions on real safety infrastructure, or does it only raise alerts on a dashboard?
- •Is there an audit trail, and is the data captured proportionate to the safety outcome?
These are not exotic questions. They are the natural consequence of the road the industry has actually travelled to get here.
Where this is going next
The Health and Safety Executive’s 2025 research into AI in regulated sectors identified roughly 250 use cases in industry, and explicitly named context-aware pedestrian and vehicle interaction as one of the live applications of computer vision for occupational monitoring.6 The next decade of work is less about whether AI belongs in industrial safety, and more about how it is deployed, governed and measured.
That last part is where SAiFI is investing: more detection domains, more action types, more credible measurement of outcomes on real sites. The hardware and the algorithms are caught up with the ambition. The engineering discipline has to keep up too.
Sources & references
- Deep Blue, IBM history · IBMMatch details (May 1997, New York), 32 processors, evaluation rate of ~200 million chess positions per second, and the team behind the system.
- ImageNet Classification with Deep Convolutional Neural Networks (AlexNet) · Krizhevsky, Sutskever & Hinton, NIPS 2012Top-5 test error of 15.3% on ILSVRC-2012 versus 26.2% for the next best entry.
- You Only Look Once: Unified, Real-Time Object Detection (YOLO) · Redmon, Divvala, Girshick & Farhadi, CVPR 2016Base model at 45 fps; Fast YOLO at 155 fps; detection reframed as a single-shot regression problem.
- Mastering the game of Go with deep neural networks and tree search (AlphaGo) · Silver et al., DeepMind, Nature, January 2016Combined value and policy networks with Monte Carlo tree search.
- Edge AI hardware overview · NVIDIA (representative reference; other vendors include Google, Intel and Qualcomm)Industrial-grade edge AI accelerators by the early 2020s typically delivered tens of trillions of operations per second in compact, power-efficient modules suitable for industrial enclosures.
- HSE’s regulatory approach to Artificial Intelligence (AI) · Health and Safety Executive, 2025HSE research identifying ~250 AI use cases across regulated sectors, including computer-vision-based occupational monitoring.